하드웨어 없이 로봇 공학을 시작하는 방법: AI 및 Wokwi를 사용하여 주차 센서 구축

고유한 소프트웨어 애플리케이션을 구축하기 위한 진입 장벽은 매우 높습니다.
완전히 감소하고 있지만 역사적으로 하드웨어 솔루션 개발에 대한 장벽은 여전히 높았습니다. 일반적으로 돈, 배송 시간 및 특정 부품이 필요합니다.
그러나 상황이 바뀌고 있습니다. 오늘은 하드웨어 하나도 소유하지 않고 로봇 공학을 시작하는 방법을 보여 드리겠습니다. 우와 그리고 구글 제미니.
이 튜토리얼에서는 먼저 디지털 방식으로 주차 센서 시스템을 구축한 다음 이를 실제 하드웨어로 포팅하는 방법을 보여 드리겠습니다.
도구
- 워퀴: ESP32 및 Arduino와 같은 마이크로컨트롤러용 온라인 시뮬레이터입니다. 이를 통해 브라우저에서 바로 회로와 코드를 시뮬레이션할 수 있습니다.
- 구글 제미니: 우리는 AI를 사용하여 C++ 코드를 작성하고 JSON을 통해 복잡한 배선 연결을 처리할 것입니다.

1단계: 기준 시뮬레이션 탐색
우리는 기존의 시뮬레이션으로 시작합니다. 우와 (ESP32/Arduino 시뮬레이터). 현재 시각전용주차시스템을 운영하고 있습니다.
당신이 쳤을 때 시뮬레이션 시작초음파 거리 센서와 LED 링이 보입니다.
- 녹색/흰색: 물체가 멀리 있습니다.
- 노란색: 물체가 다가오고 있습니다.
- 빨간색(깜박임): 물체가 매우 가깝습니다.
보기에는 좋아 보이지만 실제 주차 센서에는 소리. 오디오 구성 요소를 추가해야 합니다.
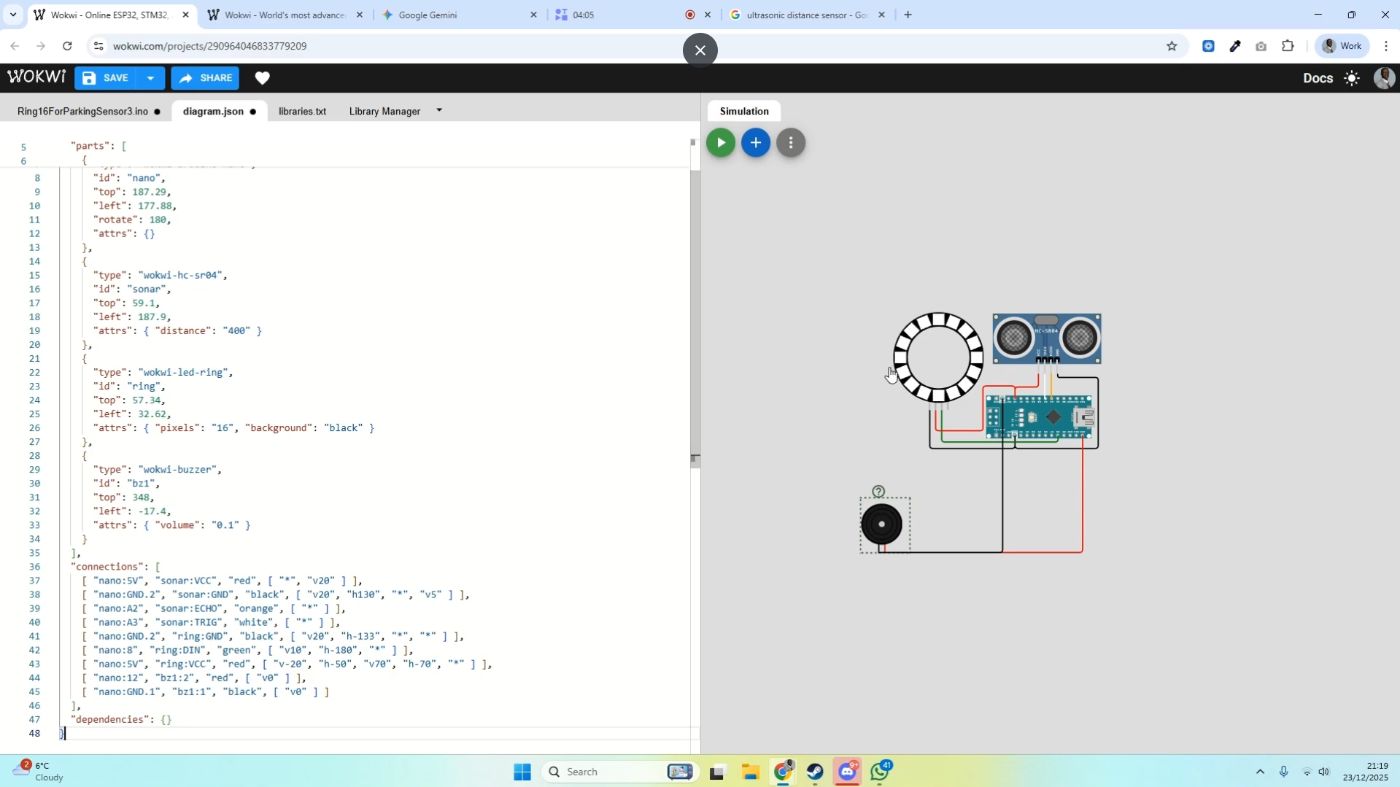
2단계: 가상 부품 소싱
코드를 작성하기 전에 가상 보드에 하드웨어를 추가해야 합니다.
- 시뮬레이션을 중지합니다.
- 다음을 클릭하세요. “+”(부분 추가) Wokwi의 버튼입니다.
- 다음을 검색하세요. 버저 (피에조).
- 캔버스 위에 놓습니다.
참고: 현실 세계에서는 이때가 Google에서 부품을 검색하는 순간입니다. “초음파 거리 센서”를 검색하면 가격이 £2~£3 정도인 것을 알 수 있습니다. 따라서 나중에 시뮬레이션에서 현실로 전환하는 것이 매우 저렴해집니다.
3단계: “게으른” 배선 방법(AI 사용)
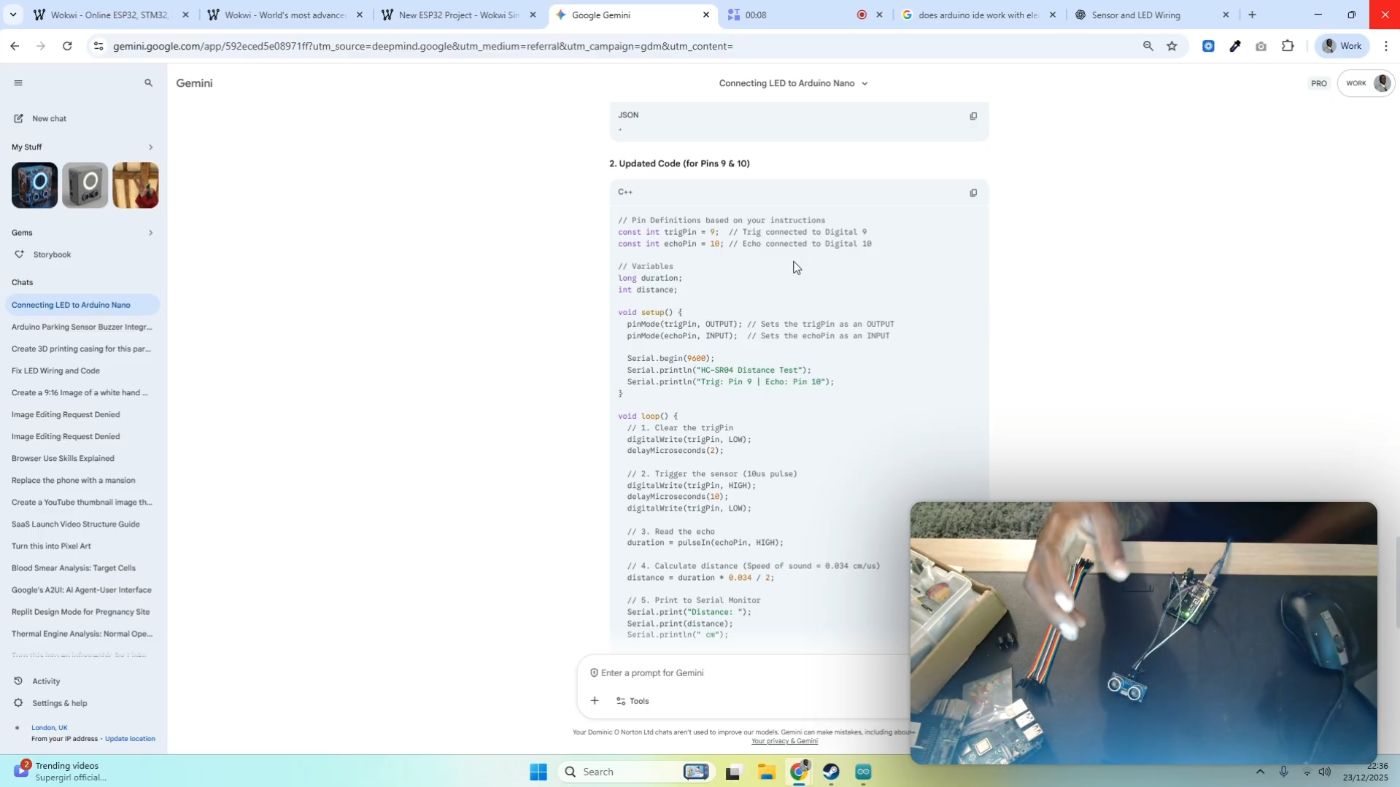
이제 연결이 끊어진 상태로 화면에 부저가 떠 있습니다. 수동으로 와이어를 핀으로 드래그하는 대신 다음을 사용합니다. 구글 제미니 우리를 위해 연결을 처리합니다.
저는 Gemini에 두 개의 컨텍스트 파일을 제공했습니다.
- 그만큼 다이어그램용 JSON (물리적 레이아웃).
- 그만큼 코드용 JSON (논리).
프롬프트:
“버저를 보드에 연결하세요.”
(처음에는 Raspberry Pi에 연결하라고 요청했지만 Gemini는 똑똑해서 다이어그램이 실제로 Arduino를 사용했음을 지적하고 수정된 배선 JSON을 생성했습니다.)
4단계: “긴급” 논리 생성
부저를 연결했지만 아직 소리가 나지 않습니다. 우리는 실제 자동차처럼 거리에 따라 신호음의 높이와 빈도가 변경되기를 원합니다.
프롬프트:
“자동차가 가까워질수록 부저의 음높이가 더 높아지고 긴급해 지도록 조정해 드릴까요?”
\
Gemini는 이 논리를 확인하고 센서 데이터를 기반으로 버저를 구동하는 데 필요한 C++ 코드를 생성했습니다.
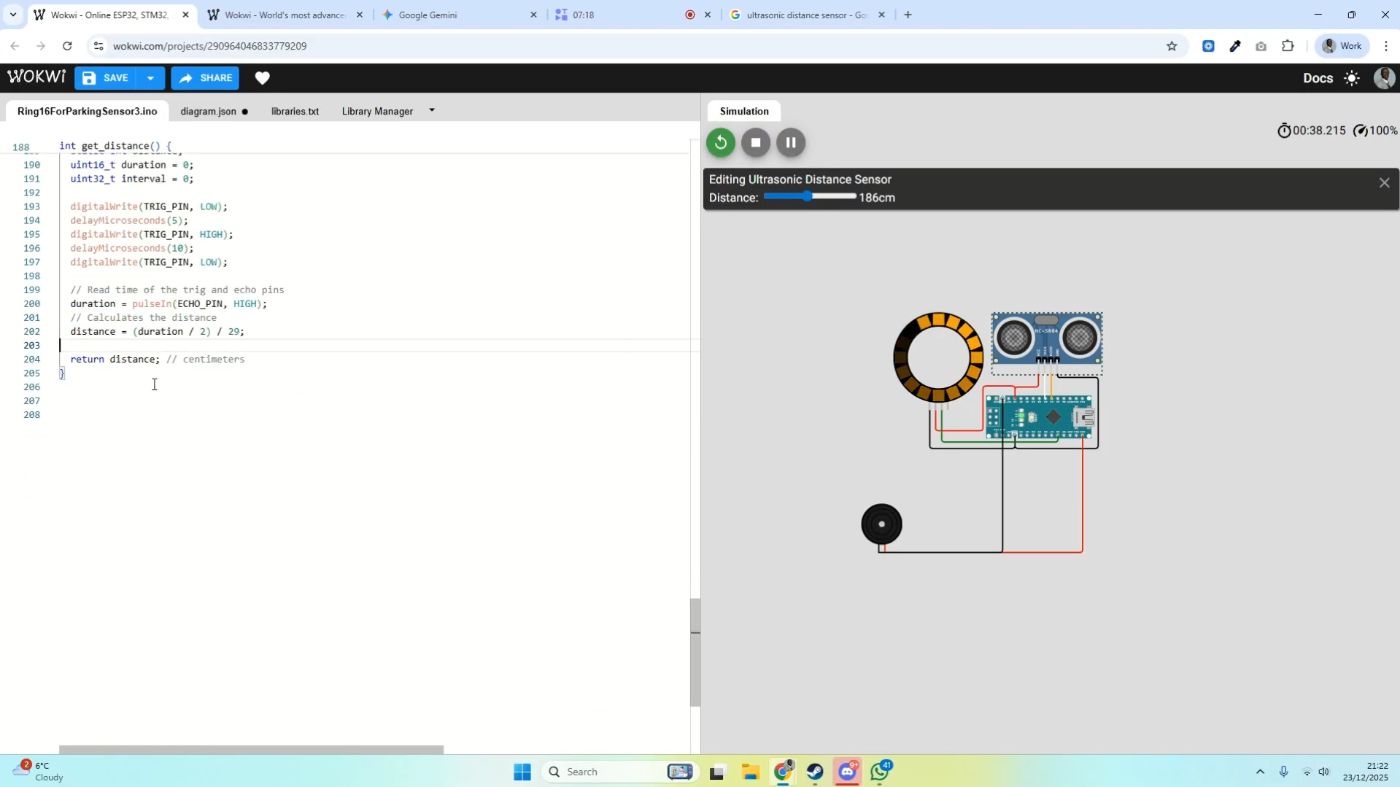
5단계: 시뮬레이션 테스트
- Gemini에서 C++ 코드를 복사합니다.
- 메인에 붙여넣기
.inoWokwi에 있는 파일입니다. - 때리다 시뮬레이션 시작.
- 초음파 센서를 클릭하면 물체가 더 가까이 움직이는 것을 시뮬레이션할 수 있습니다.
“거리”가 감소함에 따라 음조가 올라가고 신호음이 빨라지는 것을 들어야 합니다. 우리는 30분 안에 작동하는 프로토타입을 만들었습니다.
8단계: 물리적 하드웨어로 전환
여기에 Elegoo Arduino 보드, HC-SR04 센서, 버저 등 실제 구성 요소가 있습니다.
우리는 똑같은 코드 방금 시뮬레이터에 썼습니다.
- USB를 통해 Arduino 보드를 컴퓨터에 연결하십시오.
- 열기 아두이노 IDE.
- 보드와 포트를 선택하세요.
- 때리다 업로드.
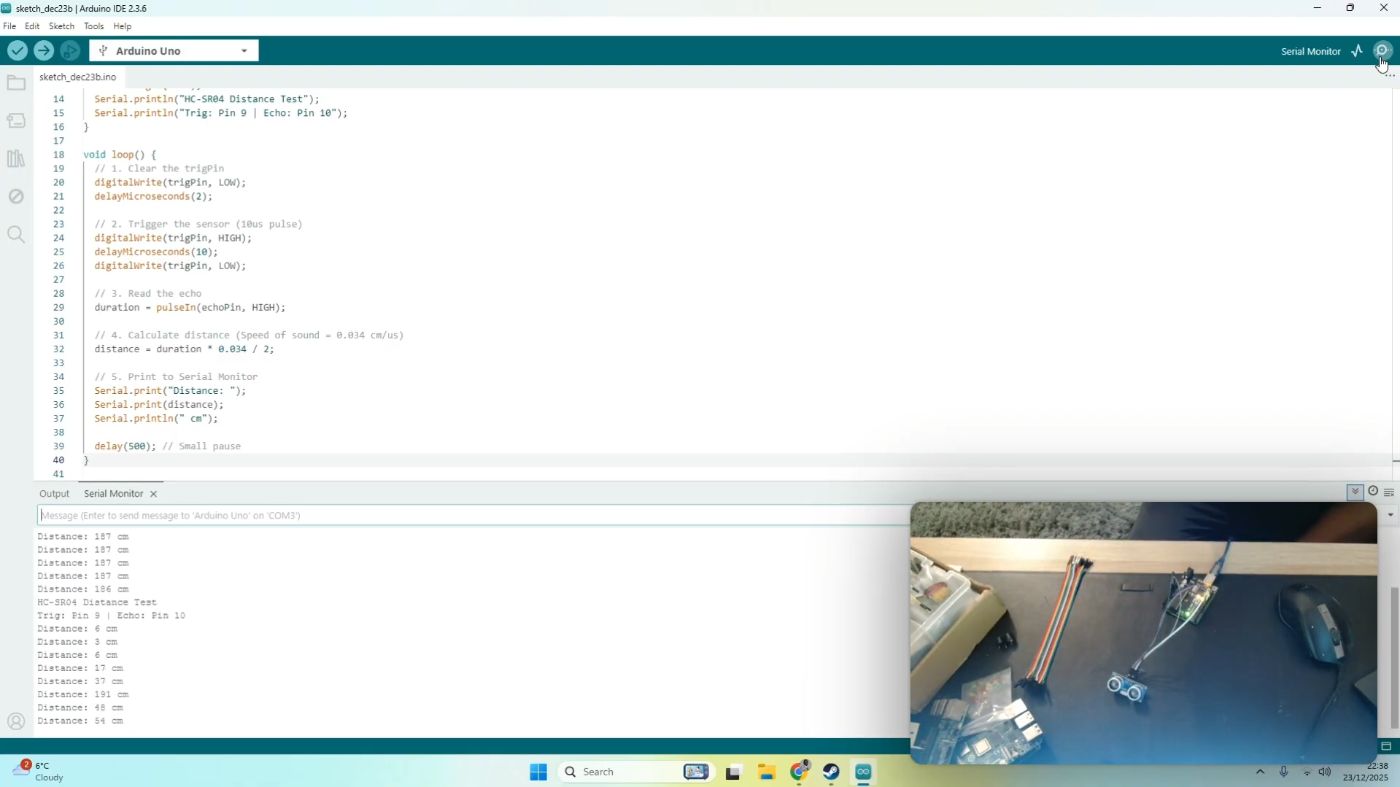
9단계: 직렬 모니터로 확인
데이터를 검증해야 합니다.
- Arduino IDE에서 시리얼 모니터 (보통 오른쪽 상단에 위치)
- 숫자가 스크롤되는 것을 지켜보세요.
이 숫자는 거리를 센티미터 단위로 나타냅니다. 센서 앞으로 손을 움직이면 이 숫자가 변경되어야 합니다. 이는 센서가 올바르게 작동하고 있음을 확인합니다.
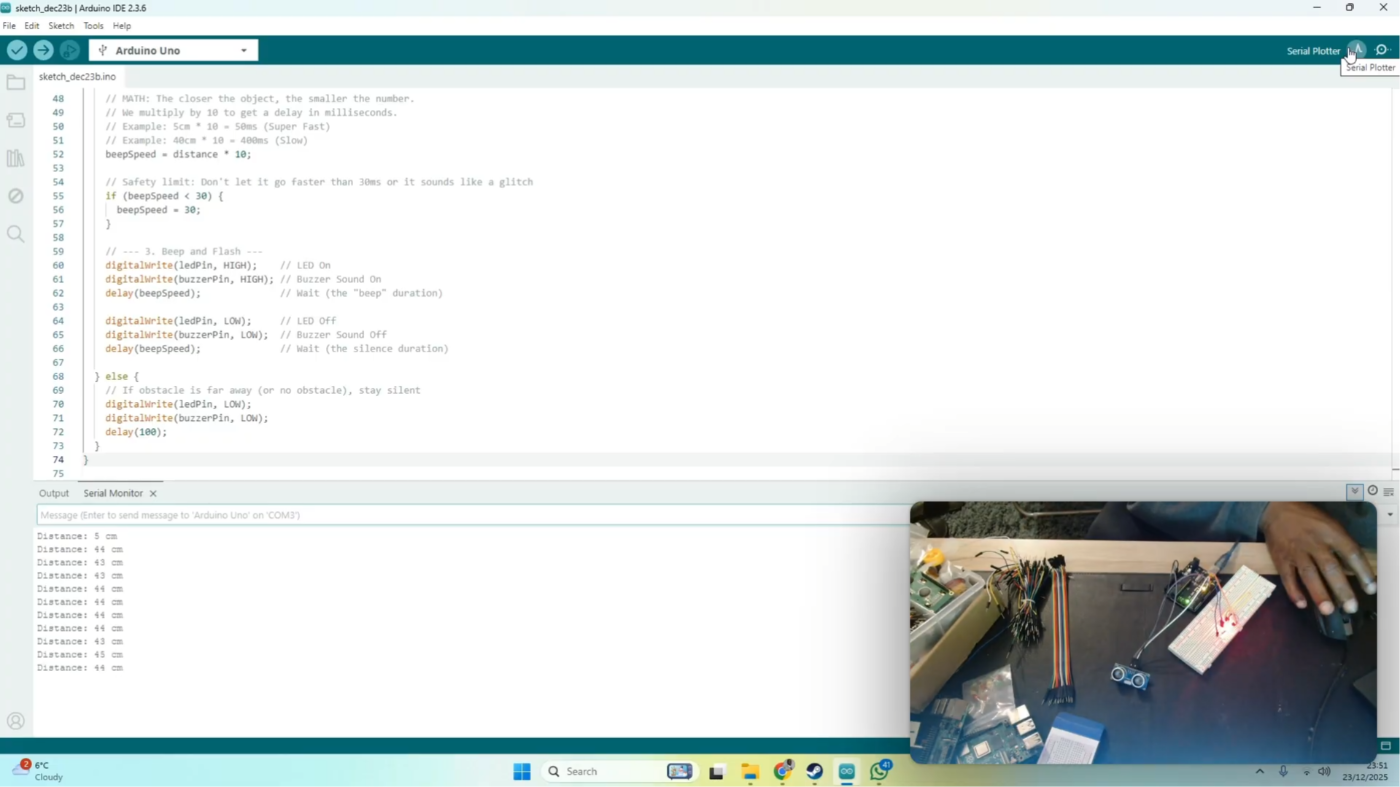
10단계: 최종 통합 테스트
이제 전체 빌드를 살펴보겠습니다.
- 손을 가까이 움직여 보세요: LED가 빨간색으로 빠르게 깜박이고 부저가 긴급하게 비명을 지릅니다.
- 손을 멀리 옮깁니다. 깜박임이 느려지고 경고음이 더 깊고 느려집니다.
우리는 디지털 시뮬레이션을 물리적 세계에 성공적으로 반영했습니다.
로봇공학의 진입 장벽은 그 어느 때보다 낮았습니다. 복잡한 아이디어의 프로토타입을 시작하기 위해 더 이상 배송을 기다리거나 값비싼 구성 요소에 투자할 필요가 없습니다. Wokwi의 가상화 성능과 코딩 인텔리전스를 결합하여 쌍둥이자리클라우드에서 전적으로 하드웨어 솔루션을 구축하고, 중단하고, 반복할 수 있습니다. 그러나 AI는 다음과 같이 사용될 때 가장 강력하다는 점을 기억하십시오. 보조 도구 이해를 대신하는 것이 아니라. 코드 작성만 요청하지 말고 가르쳐 달라고 요청하세요. 왜 코드가 작동합니다. 브라우저를 열고 시뮬레이터를 실행한 후 구축을 시작하세요.
\ \
나를 따르라:
www.linkedin.com/in/ dominiconorton
\ \ \


가 논란의 여지가 있는 가격 테스트를 종료했다.")



")
가 논란의 여지가 있는 가격 테스트를 종료했다.")





Post Comment