WebRTC와 Python을 사용하여 실제 드론 아바타를 구축하는 방법

우리는 움직임을 멈추었지만 탐색을 멈추지 않았습니다.
팬데믹은 의사소통을 위해 물리적인 존재가 항상 필요한 것은 아니라는 점을 우리에게 가르쳐 주었습니다. Zoom, Slack, Miro가 있습니다. 그러나 이는 화면에 국한된 2D 경험입니다. “Telework”의 다음 진화는 다리 없는 만화가 있는 VR 회의실이 아닙니다. 그것은물리적 세계에서의 존재.
런던에 앉아 탄자니아의 사파리를 직접 탐험하거나 북해의 풍력 터빈을 검사하면서 눈과 귀 역할을 하는 드론을 조종한다고 상상해 보세요. 이것이 개념이다드론 아바타를 통한 가상 이동성.
이 가이드에서는 다음을 구축하는 데 필요한 스택을 설계합니다.드론 아바타 시스템. 우리는 단순한 레크리에이션 비행을 넘어 비행에 필요한 엔지니어링에 대해 살펴볼 것입니다.원격 ID,저지연 스트리밍그리고차량 관리.
개념: 의식과 위치의 분리
운송이란 역사적으로 정보(시각/청각)를 얻기 위해 몸(덩어리)을 특정 장소로 이동하는 것을 의미했습니다. \N 가상 모빌리티이 방정식을 해킹합니다. 그것은센서(카메라/마이크)를 해당 위치로 전송하고 데이터를 사용자에게 다시 스트리밍합니다.
스왑의 물리학:
- 물리적 여행:높은 에너지(CO2), 높은 시간 비용, 높은 위험.
- 드론 아바타:낮은 에너지(배터리), 즉각적인 이동(네트워크 대기 시간), 물리적 위험 없음.
이를 현실로 만들려면 드론을 장난감이 아닌, 드론으로 다루어야 합니다.IoT 에지 장치고대역폭 업링크를 사용합니다.
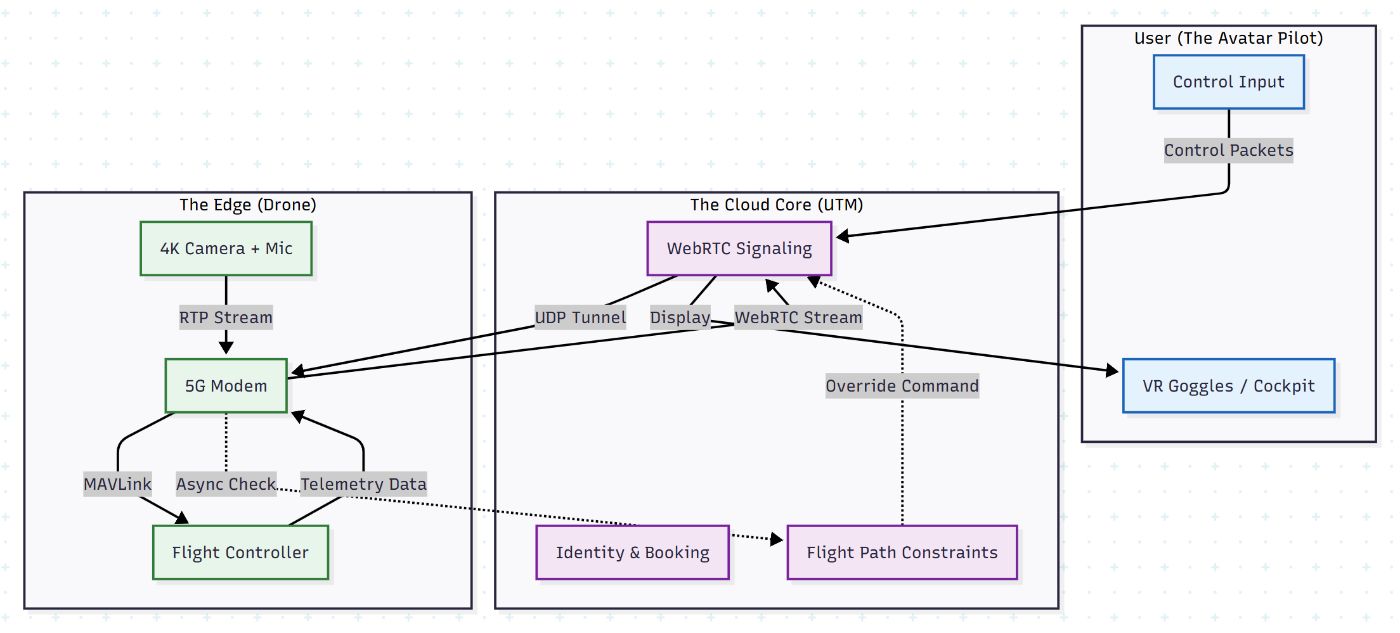
아키텍처: 텔레프레즌스 스택
드론 아바타 시스템을 구축하려면 세 가지 별개의 레이어가 필요합니다.
-
엣지(드론):비행 안정성, 충돌 방지 및 비디오 인코딩을 처리합니다.
-
파이프(네트워크):WebRTC 스트림 및 제어 신호(MAVLink)를 처리하는 5G/LTE.
-
핵심(UTM – UAS 트래픽 관리):비행 경로, 인증, 사용자 간의 제어 “인계”를 관리하는 백엔드입니다.
1단계: 엣지 – 원격 측정 및 제어
우리는 비행 물리학을 재발명할 필요가 없습니다. 우리는MAVLink드론의 비행 컨트롤러(보통 ArduPilot 또는 PX4)와 통신하기 위한 프로토콜입니다.
다음은 온보드 “브레인” 역할을 하기 위해 드론킷을 사용하는 Python 스크립트입니다. 비행 컨트롤러에 연결되어 원격 조종사를 위한 보안 인터페이스를 제공합니다.
from dronekit import connect, VehicleMode, LocationGlobalRelative
import time
# Connect to the Flight Controller (e.g., via UART or UDP)
# In production, this runs on a Raspberry Pi/Jetson onboard the drone
connection_string = '/dev/ttyACM0'
print(f"Connecting to vehicle on: {connection_string}")
vehicle = connect(connection_string, wait_ready=True)
def arm_and_takeoff(aTargetAltitude):
print("Basic pre-arm checks")
# Don't let the user fly if the drone has GPS issues
while not vehicle.is_armable:
print(" Waiting for vehicle to initialise...")
time.sleep(1)
print("Arming motors")
vehicle.mode = VehicleMode("GUIDED")
vehicle.armed = True
while not vehicle.armed:
print(" Waiting for arming...")
time.sleep(1)
print("Taking off!")
vehicle.simple_takeoff(aTargetAltitude)
# Wait until the vehicle reaches a safe height
while True:
print(f" Altitude: {vehicle.location.global_relative_frame.alt}")
if vehicle.location.global_relative_frame.alt >= aTargetAltitude * 0.95:
print("Reached target altitude")
break
time.sleep(1)
# In a real avatar scenario, these commands come from the Network Socket
# arm_and_takeoff(10)
이것이 중요한 이유:“아바타” 경험을 위해서는 드론이 반자동이어야 합니다. 사용자는 “앞으로 가세요”라고 말하지만 온보드 코드는 바람 저항과 안정화를 처리합니다.
2단계: 눈 – 낮은 지연 시간 스트리밍
사용자가 그런 느낌을 받을 수 있도록~이다드론, 지연 시간은 이보다 낮아야 합니다.200ms. 표준 HLS/RTMP(YouTube에 사용됨)에는 10초 이상의 지연이 있습니다. VR에서는 멀미가 발생합니다.
우리는G스트리머UDP/SRT 또는 WebRTC를 통해 원시 H.264 비디오를 직접 펌핑합니다.
**파이프라인: \ 카메라 -> 하드웨어 인코더 -> RTP/UDP -> 5G 네트워크 -> VR 헤드셋
# Example GStreamer pipeline for sending low-latency video from the Drone
# This runs on the companion computer (e.g., Nvidia Jetson)
gst-launch-1.0 -v \
nvarguscamerasrc ! \
'video/x-raw(memory:NVMM), width=1920, height=1080, framerate=30/1' ! \
nvv4l2h264enc bitrate=5000000 insert-sps-pps=true ! \
rtph264pay config-interval=1 ! \
udpsink host=<USER_IP> port=5000
3단계: 백엔드 – 무인 트래픽 관리(UTM)
수천 개의 “드론 아바타”가 날아다니면 혼란이 생길 수 없습니다. 우리는UTM(UAS 트래픽 관리)체계. 이것은 본질적으로 코드의 “항공 교통 관제”입니다.
UTM은 다음을 담당합니다.원격 ID(드론의 번호판) 및지오펜싱. 사용자가 제어권을 가지려면 먼저 시스템이 비행 경로를 검증해야 합니다.
비행 계획 스키마(JSON)
백엔드 데이터베이스에서 비행 승인 요청을 구성하는 방법은 다음과 같습니다.
{
"flight_id": "uuid-5501-abfe",
"drone_id": "DRONE_AVATAR_01",
"operator_id": "USER_778",
"status": "APPROVED",
"telemetry": {
"altitude_limit": 120, // meters (legal limit)
"geofence_polygon": [
{"lat": 35.6895, "lon": 139.6917},
{"lat": 35.6890, "lon": 139.6920},
{"lat": 35.6885, "lon": 139.6910}
]
},
"emergency_failsafe": "RETURN_TO_HOME"
}
논리:
- 사용자가 제어를 요청합니다.
- 시스템은 날씨(API를 통해)와 비행 금지 구역(GeoJSON을 통해)을 확인합니다.
- 시스템이 flight_id를 승인합니다.
- 드론 GPS가 geofence_polygon을 벗어나면 시스템이 사용자를 무시하고 자동 착륙합니다.
활용 사례: 시력 공유 경제
가장 확장 가능한 구현은 개인 소유권이 아닙니다. 그것은공유. 스쿠터용 Lime/Uber와 마찬가지로서비스형 드론.
시나리오: 가상 사파리
- 전개:탄자니아의 한 공원은 충전 도크를 갖춘 50대의 드론을 보유하고 있습니다.
- 예약:귀하(뉴욕)는 30분 슬롯에 20달러를 지불합니다.
- 연결:VR 헤드셋이 Drone #14에 연결됩니다.
- 경험:당신은 사바나 위로 날아갑니다. 드론의 마이크는 자연의 소리를 스트리밍합니다. 카메라는 영상을 스트리밍합니다.
- 이양:배터리가 20%에 도달하면 시스템은 연결을 새 드론으로 자동 교체하고 기존 드론은 다시 충전합니다.
사회적 영향
이 기술은 이퀄라이저입니다.
- 접근성:노인이나 신체 장애자가 산에 “등반”할 수 있습니다.
- 환경:제트 연료가 없는 관광.
- 안전:사람을 밧줄에 매달지 않고도 다리의 균열을 검사합니다.
결론
위한 기술드론 아바타오늘날 존재합니다. 우리에게는 대역폭(5G), 로봇공학(소비자 드론), 프로토콜(WebRTC)이 있습니다.
이제 개발자의 과제는 “우리가 날 수 있을까?”가 아니라 “우리가 관리할 수 있을까?”입니다. 건물UTM 레이어 – 안전하고 인증되고 규제된 백엔드는 인간 경험을 위한 새로운 매체로 하늘을 여는 열쇠입니다.
구축할 준비가 되셨나요?프로그래밍 가능한 드론을 준비하고, Dronekit-python을 설치하고, 나만의 아바타 코딩을 시작해 보세요.
\













Post Comment